Chapter 55 Forcing and resonance
This chapter is planned for academic year 2022-2023.
maybe return to the cruise control stability problem, putting in disturbances from the car in front.
55.1 Car following dynamics
# random forcing of unit variance
Pts <- tibble::tibble(
t = seq(0,1000, by=0.5),
y = rnorm(length(t))
)
random_forcing <- spliner(y ~ t, data = Pts)
slice_plot(random_forcing(t/5) ~ t, domain(t=0:100))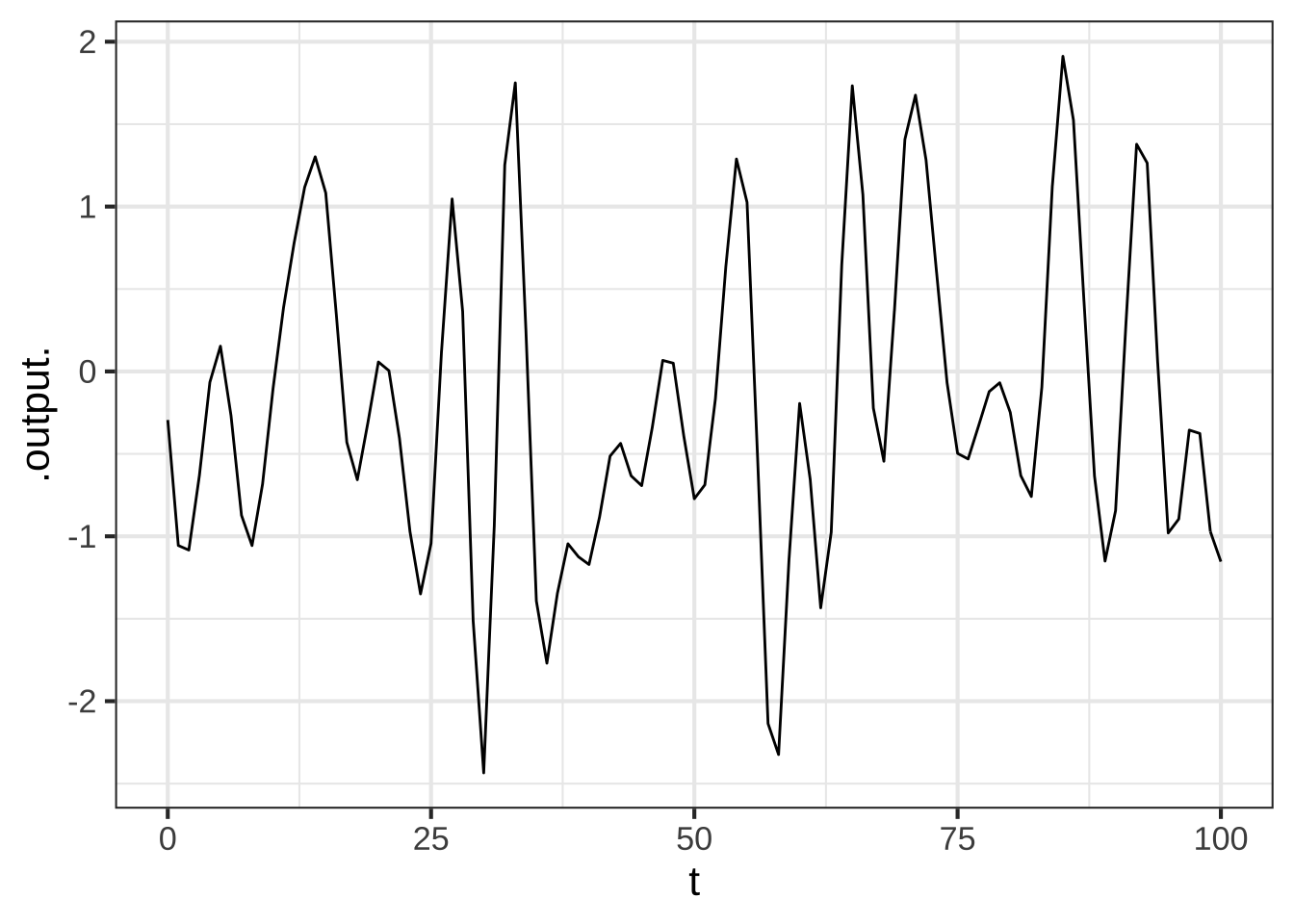
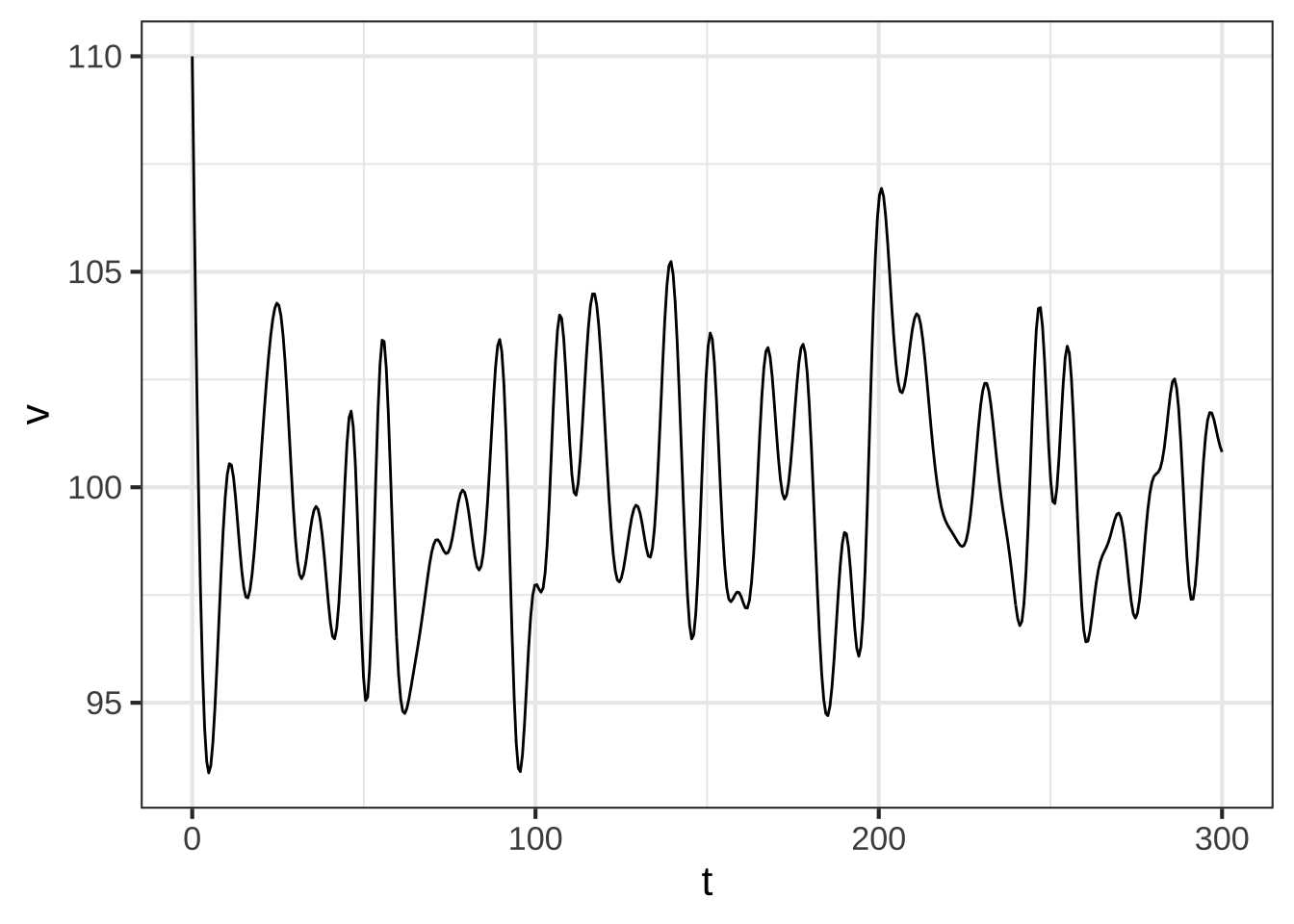
traj <- integrateODE(
dx ~ -r*(x-x0) -(v - (vf+3*random_forcing(t/8))),
dv ~ b*(x-x0),
dtime ~ 1,
vf = 100, # feet/second
x0 = 150, # feet
b = .25, # per second,
r = .5, # damping
x = 125,
v = 110,
time = 0,
tdur = list(to=300, dt=0.01))
traj_plot(v(t) ~ t, traj, domain=domain(t=0:300))